CoSaTrak - Computerised Satellite Tracking
- Electronics and Software overview -
by Willie Koorts
Introduction:
Two major factors lead to the making of this program. First when
Greg Roberts got me interested in satellite tracking as a hobby some
years ago and second, after coming across
the website of Mel Bartels and his excellent explanation of
motorizing a Dobsonian telescope and putting it under computer control.
After manually tracking satellites for a while, the idea of a computer
controlled satellite tracking telescope started growing in my mind and I
soon built up a circuit and wrote some software that was able to turn old
floppy-drive stepper motors under computer control. As the program
grew these motors were subsequently installed on my telescope mount in order
to try out new features. For various reasons however, I lost interest
when the program was at the point of being able to perform some primitive
motor movements.
About three years later, Greg retired and started working on a similar project.
Following a chat during tea break one morning I was again inspired and dug
up the code, circuit diagrams and hardware. By this time he had just about
finished constructing a Bartels system, so I gave him a copy of the primitive
program to play with. He soon came back with a favorable report on what little
existed of the program at that stage, which was all the inspiration I needed to
resume working on the program again. With Greg's continual encouragement and
support, and about four months of sometimes very late night programming, the program
has reached a point where it could be released to the larger telescope
building and satellite tracking community on 21 June 2000.
Electronics:
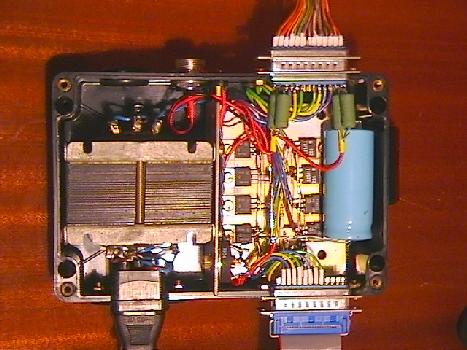
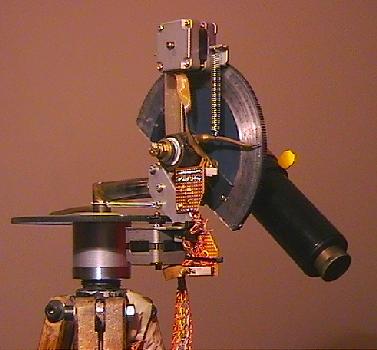
My electronics interface box
includes the transformer (left) and hardwired circuit (right) with the
mains and printer port connections coming in from the bottom and the
feed to the motors going out at the top.
|
Although similar, the hardware I built was not an exact copy of Mel Bartels
circuit and my program had to be slightly modified to drive Greg's
Bartels-implementation. The circuit
is very simple since the computer essentially becomes the indexer,
generating the complicated step patterns needed to drive the two
stepper motors. Eight output bits (four per motor) from the standard PC
parallel printer port are simply boosted by transistors in order to
switch the motor windings as required. Mel suggests buffering the
printer port output by making use of a TTL inverter or non-inverting
buffer chip, particularly when driving higher voltage motors, in order
to protect the printer port. This, however means also generating a +5V
supply to feed this chip. Since I am using low current 12V motors, I
did not include
this chip and made use of Darlington driver transistors without any ill
effect (yet!). As a safety precaution I am not running the circuit from
my motherboard-based printer port but from a seperate plug-in I/O card.
To insure as smooth a movement as possible the motors are half stepped,
effectively converting a 200step/rev. motor into a 400step/rev stepper,
moving 0.9 degrees per step.
Computer requirements:
Although initially thought that CoSaTrak would not be very demanding on
computing power, practice has shown that there is a definite gain when
running on a faster PC. The system has been tried on computers ranging
from XT's through to Pentium I class machines. The limit at which a
particular mount could keep up with fast moving satellites was found to
be directly related to computer power.
Greg originally ran on a 386 and got fair results. After switching
to an equivalent 586 type machine (without co-processor) he immediately
found that he could get faster speeds out of his motors. He can now
easily track most 80° elevation passes while still having full
display updates switched on (level 0).
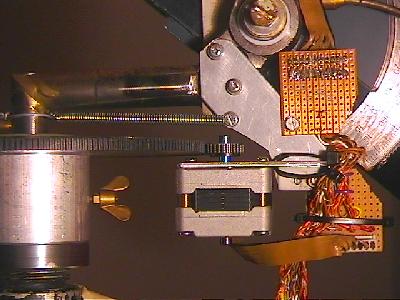
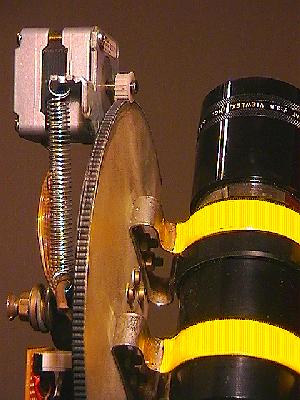
The Azimuth drive consists
of the spring tensioned motor pushing against a home-made gear
consisting of a toothed belt glued inside-out to the protactor "setting
circle" base-plate.
|
Software:
Note, the screenshots below are for and older version of CoSaTrak and will be updated soon.
The program is written in Turbo Pascal and runs under DOS, the main reason
being that Windows is not a real-time operating system. For a very
good demonstration of how poorly Windows handles real-time applications try
running the program inside a window and note how much slower the motors turn
and how irregularly the time ticks by. You can also forget trying to smoothly
run any motor when Windows occasionally sports into a hive of disk activity
doing its housekeeping.
The program options are divided into three menus;
- one for testing and calibrating the motors and all their different parameters,
- one for settings like the computer clock and your observing location
- and a third for the pointing and tracking options.
Extensive use of "hot keys" are made to
minimise keystrokes with escape routes when the wrong option was accidentally
selected.
Motor/Mount calibration Menu:
 The software provides full compatibility with Mel's system which involves changing two program
settings and you can start tracking satellites with your standard Bartel's system right away. (Read here
about the restrictions of your astronomical system with satellite
tracking.)
Another choice selects whether the mount has a cable that can get
twisted
up in the azimuth mechanism or not. Without such an umbilical the mount
is free to always take the shortest route when slewing to the next
position. When
tracking a satellite or celestial object this setting gets temporarily
disabled to allow
the mount to traverse the meridian - the mount would otherwise have
gone back "the long way" when slewing past the meridian in order to
unwrap the cable.
The software provides full compatibility with Mel's system which involves changing two program
settings and you can start tracking satellites with your standard Bartel's system right away. (Read here
about the restrictions of your astronomical system with satellite
tracking.)
Another choice selects whether the mount has a cable that can get
twisted
up in the azimuth mechanism or not. Without such an umbilical the mount
is free to always take the shortest route when slewing to the next
position. When
tracking a satellite or celestial object this setting gets temporarily
disabled to allow
the mount to traverse the meridian - the mount would otherwise have
gone back "the long way" when slewing past the meridian in order to
unwrap the cable.
All the different motor parameters like maximum speed, direction, ramp and
even the step angle (which depends on the installed motors and gearing) are
determined interactively by actually running the motors and observing when they
stall. The results are then stored in the control file as future defaults. The
motors and gearing on the two axis can be different as each axis is optimised
individually. There is thus no need to do any calculations to determine the
results for your particular motor, gearbox, etc. For extra convenience, the
last position of the mount is stored and is taken as the starting position the
next time the program is run.
Settings Menu:
The PC real-time clock is used throughout as the time base for satellite
tracking and sidereal time calculation which is used for pointing at
astronomical objects. The accuracy of pointing and tracking thus depends on
how well the computer clock is set and how stable the clock is.
Up to 50 observing site coordinates can be added to the database and stored in
a disk file for easy selection later. Your favourite site is stored in the
control file by default so there is no need to select a site unless you change
your location.
Pointing and Tracking Menu:
 Although the real intention of this program is to track satellites, a
database of up to 700 astronomical objects, grouped in 7 lists of 100 objects
each, can be edited to one's own taste and is available to point, track or
calibrate the mount. To simplify programming the Sun, Moon and planet positions
are not computed in the program, but any Alt/Az or RA/DEC coordinate can be
directly entered into the program and subsequently tracked.
Although the real intention of this program is to track satellites, a
database of up to 700 astronomical objects, grouped in 7 lists of 100 objects
each, can be edited to one's own taste and is available to point, track or
calibrate the mount. To simplify programming the Sun, Moon and planet positions
are not computed in the program, but any Alt/Az or RA/DEC coordinate can be
directly entered into the program and subsequently tracked.
For tracking satellites the program does not do its own predictions but reads
in prepared text files of predictions. This done by first running SeeCoSat, written by Greg.
Real time curve fitting interpolation is performed between these predicted
positions when tracking a satellite.
Starting with the last option, the simplest from of satellite spotting is
"Slew and Wait". For this a .SAW-file is used which can have as little
as just one prediction entry for each satellite and can have up to 100
entries per file. The mount gets slewed to each successive position and waits
for the satellite to pass through the field, before slewing to the next file
entry co-ordinates on command.
 When a prediction file is selected, the current PC time is compared to the
satellite's predicted times. An error will result if the satellite has already
passed, otherwise the mount is slewed to the predicted position of the first
time-valid entry. In this way a pass that is already underway can still be
observed, provided the mount can get into position fast enough. If not, the
next position is tried until the satellite is either caught up or the pass has
finished. Once the mount is in position and waiting for the satellite to arrive
in the field, a few options exist;
When a prediction file is selected, the current PC time is compared to the
satellite's predicted times. An error will result if the satellite has already
passed, otherwise the mount is slewed to the predicted position of the first
time-valid entry. In this way a pass that is already underway can still be
observed, provided the mount can get into position fast enough. If not, the
next position is tried until the satellite is either caught up or the pass has
finished. Once the mount is in position and waiting for the satellite to arrive
in the field, a few options exist;
- The mount can be instructed to start tracking automatically at the predicted time
- or to wait for the operator to start the track manually once the satellite has been spotted in the telescope.
- By pressing the 'N' key, the mount will advance to the next predicted position.
- Audible second-'pips' can be switched on to aid in mentally
counting down the seconds while looking through the telescope for the
satellite or watching the monitor screen.
- If there is a long wait till the next predicted time, the motor
windings can be switched off to save the motors from overheating if
this is a problem. As a matter of fact, a "windings off" option is
available in all the menus.
Automatic tracking is useful when fresh elements are used to make the
predictions and the satellite is know to be faint, phase angle sensitive or
have a long invisible period between flashes. Manual starting of the track
is best when some uncertainty exist re the accuracy of the elements or the
satellite is expected to be late or early. This time difference is then displayed.
(Greg has virtually defaulted to using the manual start method.) Slewing to the next
position can be used when the telescope is being obscured by a tree/building/cloud
or when the predicted time had passed (announced by a beep) and the satellite was
not seen.
 Once the mount has locked onto the satellite and is busy tracking, the
arrow keys can be used to move it into the centre of the telescope field. The
amount of offset with respect to the predicted position is then displayed. The prediction file
entries are displayed and updated as the pass progresses as well as the mount
Alt/Az and RA/DEC position. RA & DEC is useful, for example, to identify a
star or star-field through which the satellite moves.
Once the mount has locked onto the satellite and is busy tracking, the
arrow keys can be used to move it into the centre of the telescope field. The
amount of offset with respect to the predicted position is then displayed. The prediction file
entries are displayed and updated as the pass progresses as well as the mount
Alt/Az and RA/DEC position. RA & DEC is useful, for example, to identify a
star or star-field through which the satellite moves.
Since altazimuth telescope mounts usually have a limit in their ability to track high
elevation passes through culmination, especially at near-zenith transits because of
the large azimuth swings required, the mount can start falling behind. The
speed characteristics of your system were also measured during the calibration
procedure and is therefore known to the program. The speed requirements of the
predictions are constantly calculated and if found to exceed the mount's limits,
tracking is temporarily suspended and the mount automatically slewed ahead to the
first prediction that is within the capabilities of the mount again. Once such a
position can be reached before the satellite arrives, the mount will wait there and
start tracking automatically at the same time offset found before. However, if the
mount was unable to catch up with the satellite the track aborts after running out
of predictions.
The Altitude motor gear is
also made up by glueing a matching drive belt to a circle sector.
Again, the gears are kept in mesh by a spring.
|
Conclusion and Results
I would like to return Greg's thanks with gratitude for firstly introducing
me to the hobby of satellite tracking and for teaching me such a great deal.
This software would never have matured as it has without Greg's continual
constructive suggestions, encouragement, thorough beta-testing and reporting
back on every new version and option I could throw at him. Thinking back to
the times when we were struggling our way through some really tough bugs the
"normal" situation did not arise with the hardware-man trying to blame it on
the software or vice-versa. Greg kept modifying his mount while I took a
harder and harder look at possible software solutions - we eventually found a
very nice solution midway between these two.
Because I was developing the software on a crude setup at home, nothing could
prepare me for the result of seeing what is possible on a good mount, when
watching the first VHS recording Greg made where he took his system through its
paces for me by showing a camera-view of a few typical passes. The satellite
would virtually stay dead-still on the same position on the screen, as if a star!
When it crossed a bright star field one feels a bit disorientated for a
moment until one's brain finally works out that it is the telescope that is
moving! (Click here to see crude animations of some actual footage.)
Willie Koorts - 18 June 2007
 to CoSaTrak pages.
to CoSaTrak pages.